Robot na stacji roboczej jest specyficznym użytkownikiem ( uprawnienia https://wizlink.eu/forums/topic/uprawnienia-dla-robota/) i nie każda akcja wykonywana przez robota jest faktycznie odczytywana jako praca człowiek w windowsie. Zalecamy, aby Środowisko pracy dla robota nie miało ustawionego blokowania się w wyniku bierności użytkownika.
Natomiast można „oszukać” windows wykonując robotem aktywności ( uruchamijać programy ), które windows odczyta jako aktywność użytkownika np. odpalenie za pomoca aktywności Run Application CMD i zamknięcie go co X jednotki czasu, tak by wygaszacz się nie włączył.
Załączam scenariusz testowy:
1. Proszę otworzyć go w designerze
2. Na pulpicie umieścić pustego excela
3. Po kliknięciu w Variables( w dolnym lewym rogu flowcharta) proszę zmienić ścieżkę do excela (excelPath) oraz ścieżkę do CMD( aczkolwiek jest raczej uniwersalna).
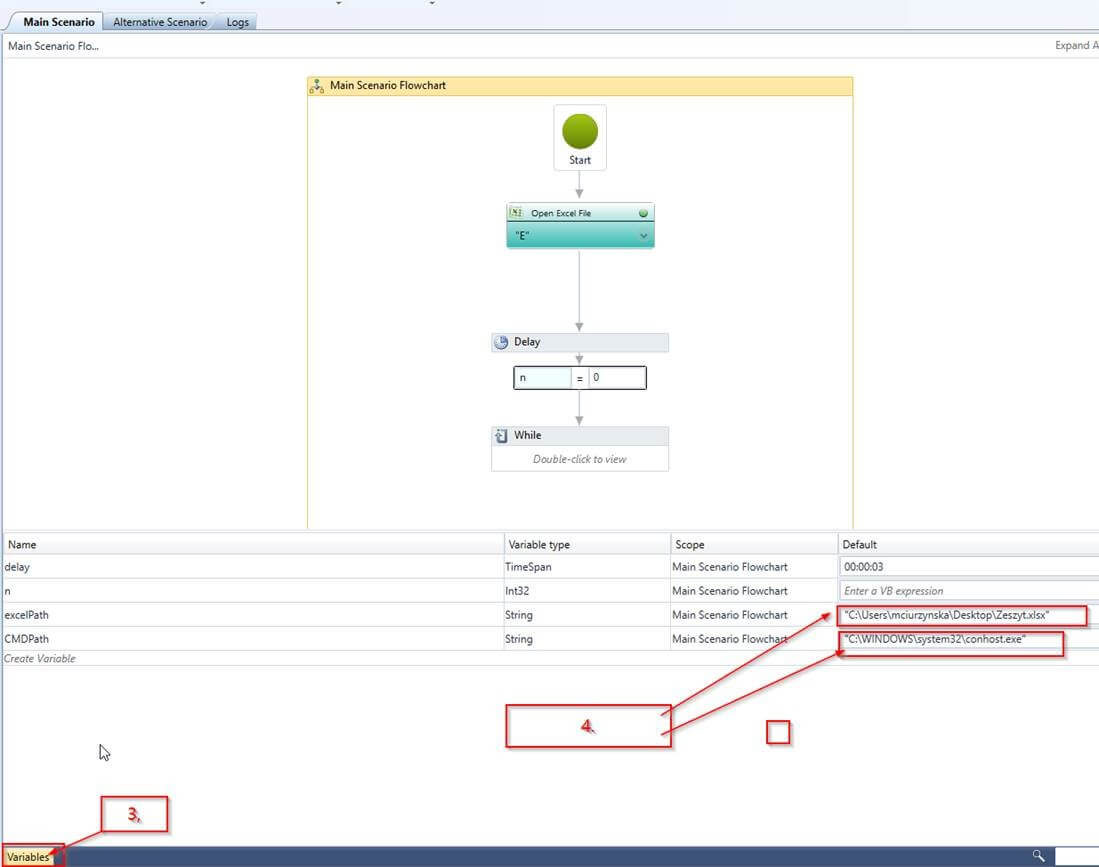
Robot z założenia otworzy excela którego Pan wskaże i zacznie wprowadzać liczby od 1 do 1000000 co 9 sekund, jeśli ten czas nie wystarczy na włączenie się blokady proszę zwiększyć ilość sekund w zmiennej delay ( teraz są tam 3 sekundy).
Robot odpala CMD i wprowadza do niego komendę „EXIT”, zamyka CMD. Uruchomienie CMD powoduje na mojej maszynie brak problemu z potencjalnym wygaszaczem i blokadą może i u Państwa się sprawdzi.
Attachments:
You must be
logged in to view attached files.
.